Los sistemas de Direcciones eléctricas se encuentran cada día más utilizados en vehículos de pasajeros, estos modernos sistemas permiten al conductor, tener mayor desempeño y maniobrabilidad al momento de una situación de riesgo, o simplemente mayor confort en una conducción cotidiana.

Básicamente la idea de este sistema es que la asistencia a la dirección no es Hidraulica, si no eléctrica, encontrándose una unidad de control electrónico denominada generalmente EPS (Electronic Power Steering), que comanda a un motor corriente directa sin escobillas generalmente, aunque pueden existir variantes. Este motor esta acoplado al sector de la dirección, y asiste al movimiento del conductor.
El movimiento del eje de la dirección es verificado por un sensor de posición, el cual puede ser Óptico, tipo potenciómetro o efecto hall.
Si la posición de la dirección no corresponde a la que debería tener en ese momento, o simplemente se presenta un malfuncionamiento en alguno de los elementos, la unidad EPS generara un código de falla, iluminara una luz en el tablero y la dirección quedara completamente mecánica, presentando dificultad al movimiento del timón. Vale aclarar que cualquier trabajo que se realice en el sistema (Ej. alineación) requiere el uso del scanner para colocar en punto cero la dirección, a continuación se presentara, la imagen de algunos de los componentes que hacen parte del sistema de control electrónico de la dirección.
MOTOR DE LA DIRECCIÓN.
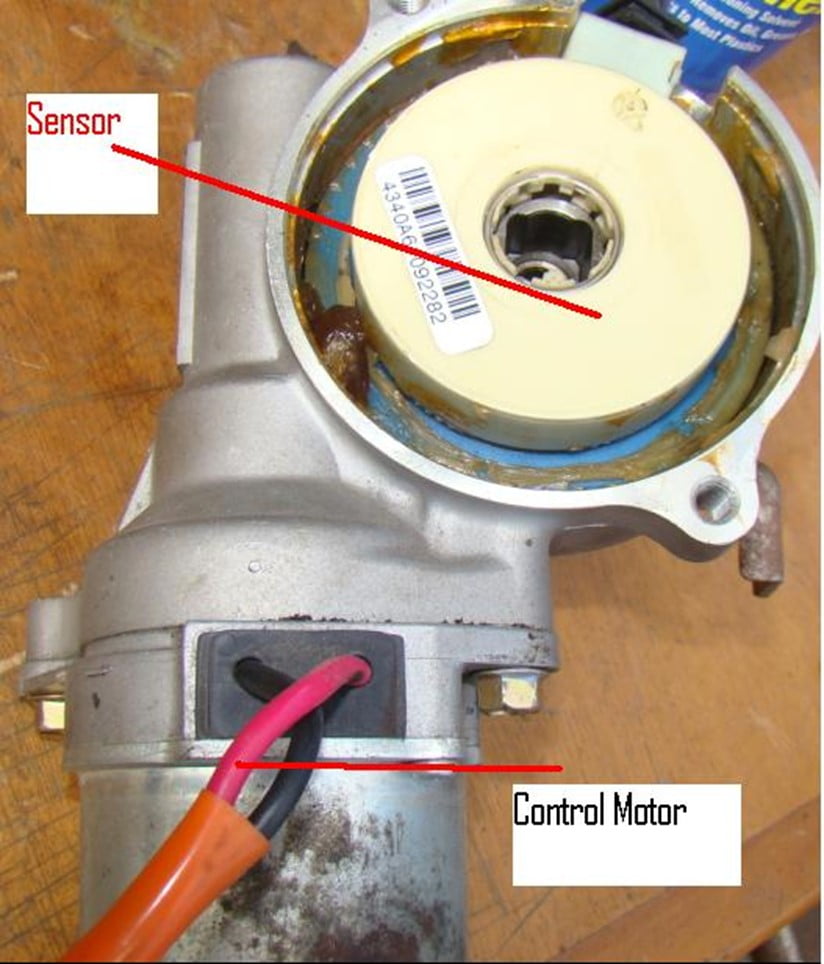
En este caso se puede apreciar que el motor es un motor de corriente directa de dos cables, el cual trabaja con inversión de polaridad, la polaridad se coloca sobre el motor de acuerdo al sentido de giro de la dirección, para eso la unidad de control electrónico cuenta internamente con una serie de transistores de potencia para este fin. En el esquema inferior se presenta un breve resumen de este control electrónico.
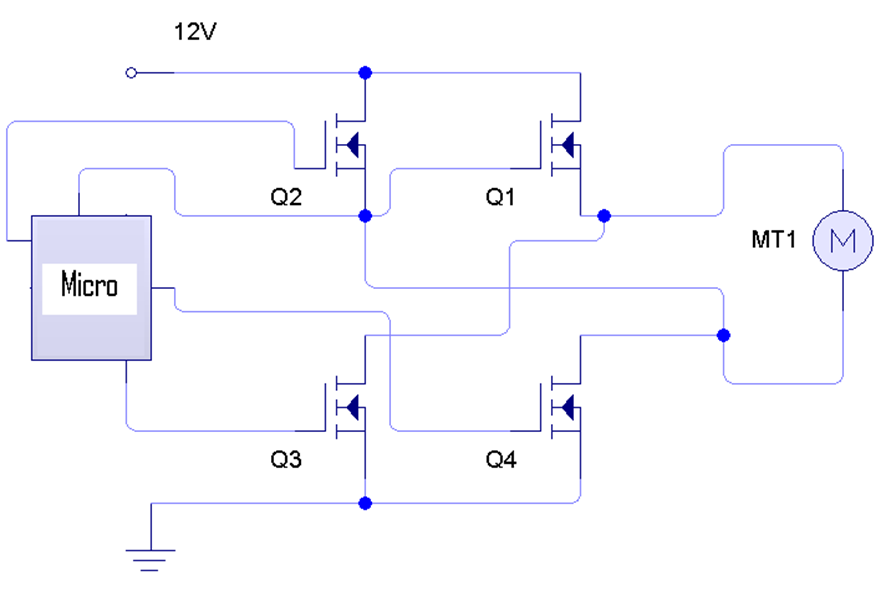
Los transistores Q1, Q2, Q3, Q4 permiten colocar las polaridades necesarias sobre el motor MT1 (motor de la dirección), básicamente la inversión es calculada por el microcontrolador que con señales de disparo a los transistores de potencia logra amplificar este control hasta el motor, la corriente que este motor maneja puede llegar hasta los 80 Ampere, de acuerdo al requerimiento de posición del sistema. Todo el comando es calculado por la unidad de control electrónico de la dirección EPS y este modulo tiene en cuenta las señales de requerimiento de asistencia, como por ejemplo la velocidad del vehículo VSS.
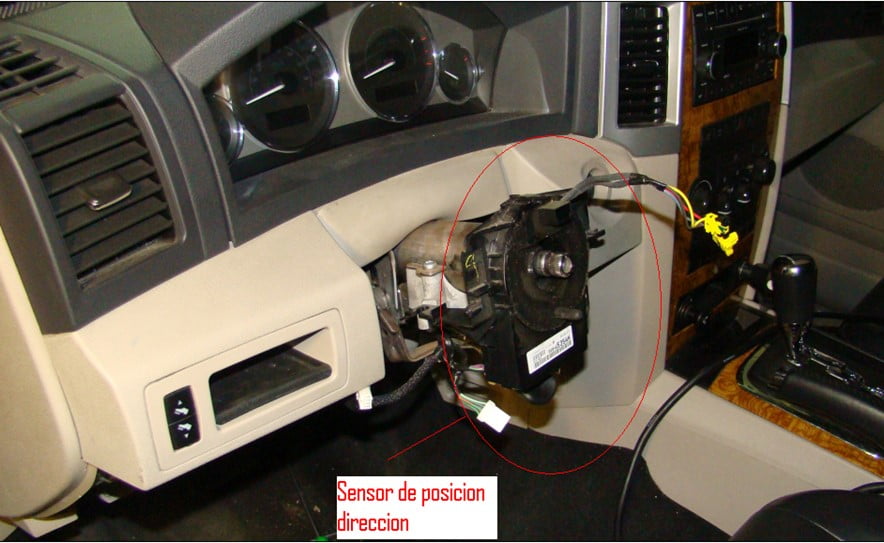
SENSOR DE POSICIÓN DE LA COLUMNA DE LA DIRECCIÓN.
Este sensor enviara la información al modulo de control del sistema de la dirección, el funcionamiento de este sensor puede cambiar de acuerdo al modelo utilizado, uno de los más usados es el tipo óptico, el cual permite manejar una señal a través de unos fototransistores a través de unas ranuras en plato internamente ensamblado en el sensor, en la imagen inferior se puede apreciar esta explicación, para el caso usando una bombilla a manera de entender el ejemplo del sensor.
Cada vez que la columna se mueve en grados, hacia un sentido o hacia otro, la luz interna de los fototransistores y fotodiodos, enfrenta las ventanas generando señales.
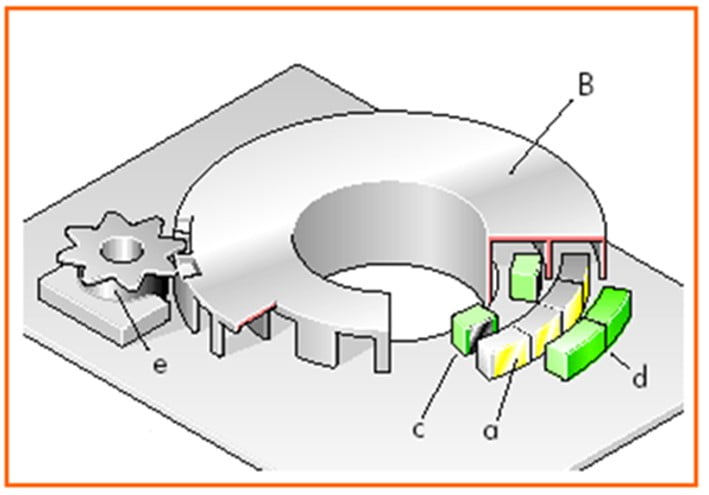
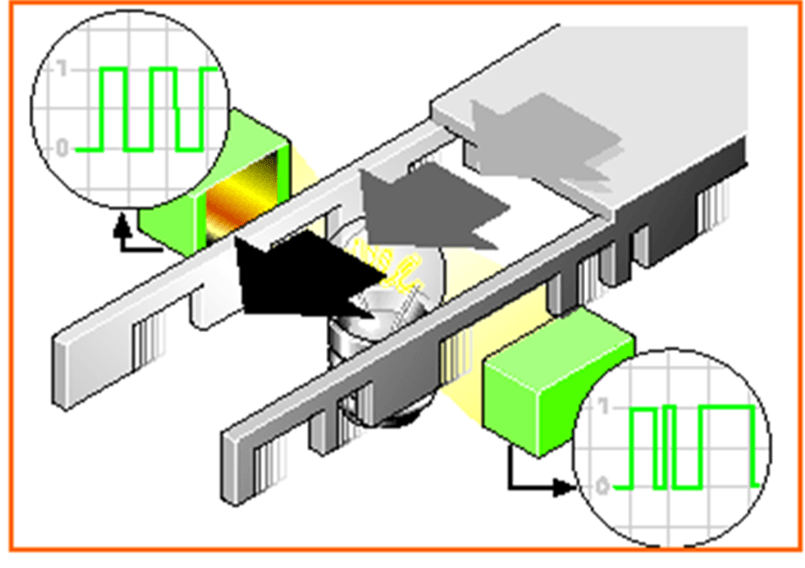
Estas señales serán ondas cuadradas, que van de 0 – 5 V, similares a las de un captor de posición efecto hall.
DIAGNOSTICO PARA EL TÉCNICO EN EL TALLER.
El técnico del taller tiene que manejar muy bien el tema de la dirección, puesto que es un sistema nuevo que involucra procesos de programación, por ejemplo después de alinear mecánicamente una dirección.
Un ejemplo del diagnostico, es cuando se quiere verificar la posición cero de la dirección Mecánica y electrónicamente, el técnico debe tener muy claro los parámetros, por ejemplo si la posición está completamente alineada mecánicamente, las ruedas están centradas, el timón derecho, y los grados en el scanner deben ser 0 Grados
Si se gira el timón hacia un costado completamente, debe mostrar aproximadamente 520 Grados y si se gira hacia el otro lado completamente debe mostrar – 520 Grados aproximadamente. En las siguientes imágenes se pueden apreciar esos ejemplos con el scanner.
TIMÓN COMPLETAMENTE RECTO RUEDAS ALINEADAS HACIA EL FRENTE.




